2019年新年伊始����,經(jīng)過了7個(gè)多月的緊張研發(fā)測(cè)試 M2M 正式發(fā)布便攜儀器專用操作平臺(tái)軟件Capture 的最新版 2.3 版�����。同步推出的版本包括 Capture GEKKO���、Capture Mantis���、Capture PC����、Capture Viewer���。Capture是M2M 兩款主要便攜式相控陣檢測(cè)儀 Gekko 和 Mantis 的機(jī)載軟件�,它是集檢測(cè)工藝設(shè)計(jì)�����、數(shù)據(jù)采集和后期數(shù)據(jù)分析為一體的相控陣檢測(cè)操作平臺(tái)���。Capture大量采用圖形化交互式全中文界面�,操作簡(jiǎn)單,功能完善已經(jīng)得到廣大用戶的一致認(rèn)可���。
Capture的設(shè)計(jì)宗旨是簡(jiǎn)單高效�����,讓操作人員可以在現(xiàn)場(chǎng)快速完成參數(shù)設(shè)置及校準(zhǔn)�,在復(fù)雜艱難的工作環(huán)境下短時(shí)間完成檢測(cè)任務(wù)�����。整個(gè)操作流程�����,各步驟的次序銜接都做到最大程度符合UT檢測(cè)人員的工作習(xí)慣���;從器材配置�、超聲工藝�����、數(shù)據(jù)采集和分析都能快速無誤的完成操作。同時(shí)M2M工程師針對(duì)不同的應(yīng)用場(chǎng)景設(shè)計(jì)了應(yīng)用模塊向?qū)?��,預(yù)置參數(shù)得到了極大的優(yōu)化����,操作步驟更加有邏輯性����,很大程度上降低了配置失誤,提高工作效率����。

完善的功能給特殊的檢測(cè)工藝設(shè)計(jì)帶來了更多的可能性�,使儀器的能被應(yīng)用到更有挑戰(zhàn)的檢測(cè)工作中。
-
支持的標(biāo)準(zhǔn)工件類型包括:管材板材原材料及焊縫����、TKY結(jié)構(gòu)焊縫、插管及管座角焊縫�����,同時(shí)對(duì)于更加復(fù)雜的工件結(jié)構(gòu)Capture支持用戶導(dǎo)入工件CAD圖,比如葉根�、大小接頭焊縫及鋼軌和一些特殊結(jié)構(gòu)鍛件等。
-
聚焦點(diǎn)分布區(qū)域的的精確設(shè)置(支持深度聚焦�、等聲程聚焦和投影聚焦)允許在某些特殊檢測(cè)應(yīng)用上得到更好的檢測(cè)靈敏度。
-
Capture提供一整套易用的快速校準(zhǔn)工具����,器材的準(zhǔn)備方面有:工件聲速、探頭晶片一致性����、探頭零點(diǎn)、楔塊聲速角度校準(zhǔn)和編碼器精度校準(zhǔn)�。超聲校準(zhǔn)包括:TCG、DAC�、DGS等的快速定量校準(zhǔn)工具。
-
豐富的視圖系統(tǒng)包括A�、B、C����、D、3D���、頂視圖�、側(cè)視圖及前視圖保證檢測(cè)結(jié)果能更加直觀地顯示,對(duì)缺陷位置的判斷更加準(zhǔn)確�,大大降低了評(píng)圖分析的時(shí)間。
Capture 在過去5年中���,以每年兩次的高效率更新速度不斷優(yōu)化操作設(shè)置���,我們認(rèn)真地傾聽用戶的意見反饋,及時(shí)調(diào)整不合理設(shè)置且對(duì)所有反饋的BUG都快速補(bǔ)救�����,下面讓我們來看今年的升級(jí)給我們帶來了哪些新的功能和性能提升���。

最新的 v2.3版本仍然以創(chuàng)新實(shí)用為指導(dǎo)���,更新優(yōu)化了多個(gè)高級(jí)功能,增加了專用工具�����,可以極大的改善用戶體驗(yàn)并提升檢測(cè)工作的效率�����。在這次最新升級(jí)中�����,M2M根據(jù)客戶所需進(jìn)行了重大更新:
-
針對(duì)腐蝕快速C掃和復(fù)合材料檢測(cè)的應(yīng)用����,進(jìn)行了功能及效率的重大提升。
-
完善了TOFD檢測(cè)及分析工具�。
-
對(duì)全聚焦的性能進(jìn)行了全面提升,極大優(yōu)化了硬件資源及TFM的成像算法�����,在同樣圖像分辨率的前提下將TFM成像檢測(cè)速度提升了3.5倍�����。
-
增加曲面楔塊角度/高度校準(zhǔn)助手(AOD / COD)���,提升了對(duì)縱向焊縫回波的定位精度����。
在此我們將選取幾個(gè)重要的功能更新進(jìn)行詳細(xì)介紹�����。
1 ·. 半步掃查法
首先是線性掃查步進(jìn)精度的提升,傳統(tǒng)的線性掃查的最小步進(jìn)為單個(gè)晶片的pitch值尺寸���,如果需要提高檢測(cè)范圍的橫向分辨率只能減小晶片Pitch值�;然而為了保證其檢測(cè)范圍一致����,必須增加探頭的晶片數(shù)量,限于儀器通道總數(shù)量已經(jīng)確定���,從而此項(xiàng)優(yōu)化無法如愿�。M2M工程師巧妙地設(shè)計(jì)了以半個(gè)晶片長(zhǎng)度為步進(jìn)精度的高精度掃查模式:“半步掃查法”�����。我們以16個(gè)晶片為一組虛擬孔徑實(shí)現(xiàn)電子掃查為例來介紹其實(shí)現(xiàn)原理���。首先傳統(tǒng)的電子掃查模式的晶片分配利用辦法為〔1-16〕〔2-17〕〔3-18〕〔4-19〕..., 虛擬探頭孔徑為固定的16個(gè)晶片為一組���,以一個(gè)晶片為步進(jìn)整體移動(dòng)����,掃查精度為一個(gè)晶片的pitch值尺寸�。
傳統(tǒng)線性電子掃查虛擬孔徑掃查方法
相對(duì)傳統(tǒng)的線性掃查����,半步掃查法的虛擬孔徑晶片分配方式為16晶片和17個(gè)晶片交替進(jìn)行:〔1-16〕〔1-17〕〔2-17〕〔2-18〕〔3-18〕〔3-19〕〔4-19〕〔4-20〕...由此以來,使用同一個(gè)探頭相對(duì)傳統(tǒng)電子掃查辦法�,可使聲束將在每半個(gè)pitch值的位置進(jìn)行一次發(fā)射接收,同一檢測(cè)位置聲束數(shù)量增加一倍�,橫向分辨率增加了一倍。需要說明16晶片與17晶片合成的聲束能量差異極小且可以通過虛擬探頭一致性校準(zhǔn)消除差異����。我們將在另外一篇文章中利用實(shí)例介紹其具體優(yōu)勢(shì)。
具體實(shí)現(xiàn)方式如下
半步法線性電子掃查虛擬孔徑掃查方法
熟悉M2M Capture軟件平臺(tái)的用戶都了解在楔塊校準(zhǔn)中Capture可以進(jìn)行楔塊角度的自動(dòng)校準(zhǔn)�,此功能對(duì)被磨損的楔塊有較好的修正作用。實(shí)現(xiàn)原理是已知楔塊聲速(可以利用Capture提供的工具進(jìn)行校準(zhǔn))前提下����,利用采集到的每個(gè)晶片單獨(dú)發(fā)射的聲波在楔塊底面(與工件接觸面)的回波聲程來計(jì)算出楔塊的延遲和角度?���?梢栽谝欢ǔ潭壬舷捎谛▔K磨損理論角度改變帶來的缺陷定位誤差問題。但是此校準(zhǔn)工具只是用于平面斜楔塊和AOD(Axial Ouside Diameter)型弧度楔塊上�,無法應(yīng)用到COD(Circumferential Outside Diameter)型楔塊上�����。
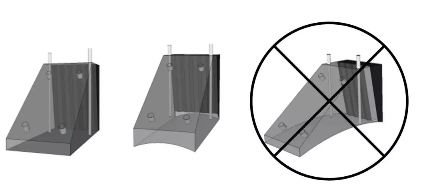
COD楔塊主要應(yīng)用到管道縱向直焊縫檢測(cè)中���,由于楔塊的特殊結(jié)構(gòu),如果沒有在設(shè)備軟件中輸入準(zhǔn)確的參數(shù)�����,將對(duì)檢測(cè)結(jié)果造成直接影響�����,比如聚焦位置的準(zhǔn)確性�����,回波定位的準(zhǔn)確性等等�����。
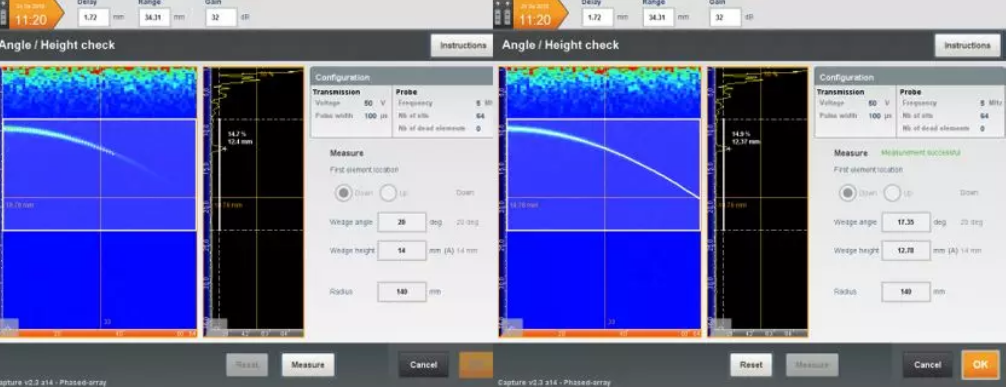
V2.3版本中新增的COD楔塊計(jì)算工具可以一鍵快速準(zhǔn)確地計(jì)算出COD楔塊的弧度����,入射點(diǎn)位置���,入射角度以及對(duì)應(yīng)的楔塊延遲�。可以最大程度降低楔塊設(shè)置的不確定性���,給管道直焊縫等結(jié)構(gòu)檢測(cè)提供了極大的便利���。此工具的重大挑戰(zhàn)是COD弧形楔塊無法像常規(guī)平楔塊或AOD楔塊一樣對(duì)每一個(gè)晶片激勵(lì)的超聲波都能有效反射,存在反射盲區(qū)(如下圖左側(cè)藍(lán)色部分回波B掃圖所示)�����,但是M2M開發(fā)的高階數(shù)學(xué)算法讓使用人員在保證能采集到一半晶片回波的前提下準(zhǔn)確計(jì)算出楔塊的弧度角度和延遲(如下圖右側(cè)計(jì)算結(jié)果)����。
3 ·. 探頭激勵(lì)接收孔徑分開自由設(shè)置
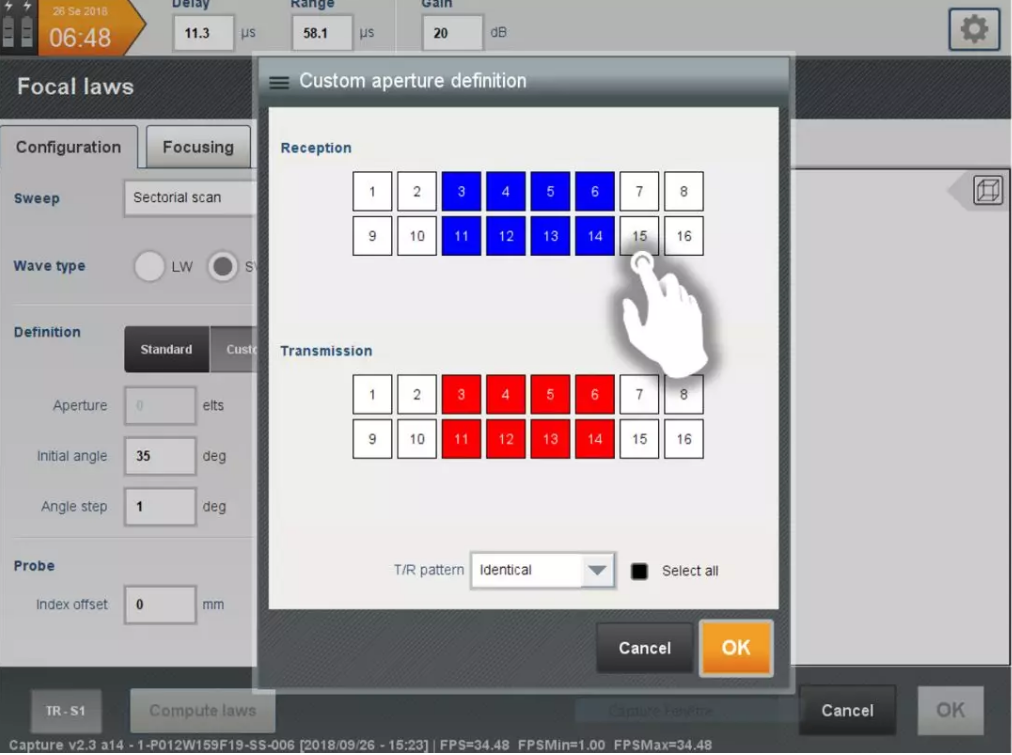
為了最大程度相控陣檢測(cè)技術(shù)的潛力,從2.3版開始Capture允許用戶自由地在同一探頭上選擇激勵(lì)與接收的孔徑(晶片組)�。在一些特殊檢測(cè)工藝中,我們?cè)?jīng)嘗試使用探頭上一部分晶片組來激勵(lì)發(fā)射脈沖����,而使用另一部分晶片組來進(jìn)行能量接收,用于檢測(cè)無法利用脈沖回波直接檢測(cè)的有方向性的缺陷比如垂直性缺陷����。同時(shí)對(duì)與一些面陣探頭檢測(cè)工藝中�����,也有用戶根據(jù)檢測(cè)厚度區(qū)域的不同�����,采用不同的工作晶片組來實(shí)現(xiàn)更好的聲束覆蓋�����。
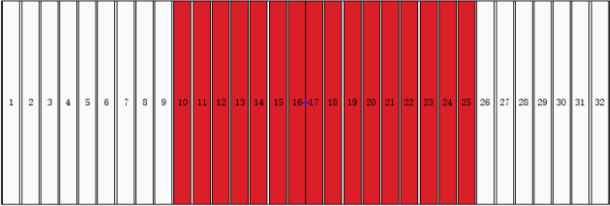
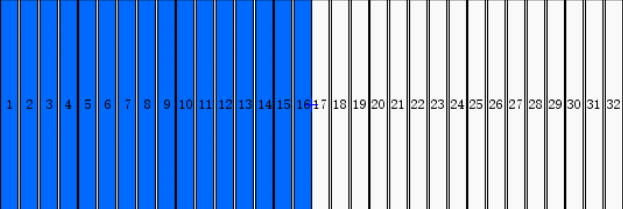
上圖中紅色晶片組為選中的激勵(lì)晶片組合���,藍(lán)色部分為選中的接收晶片組合,下方可以選擇激勵(lì)與接收一致或否�。這樣的配置適用于線陣、面陣����、雙線陣以及雙線陣探頭。
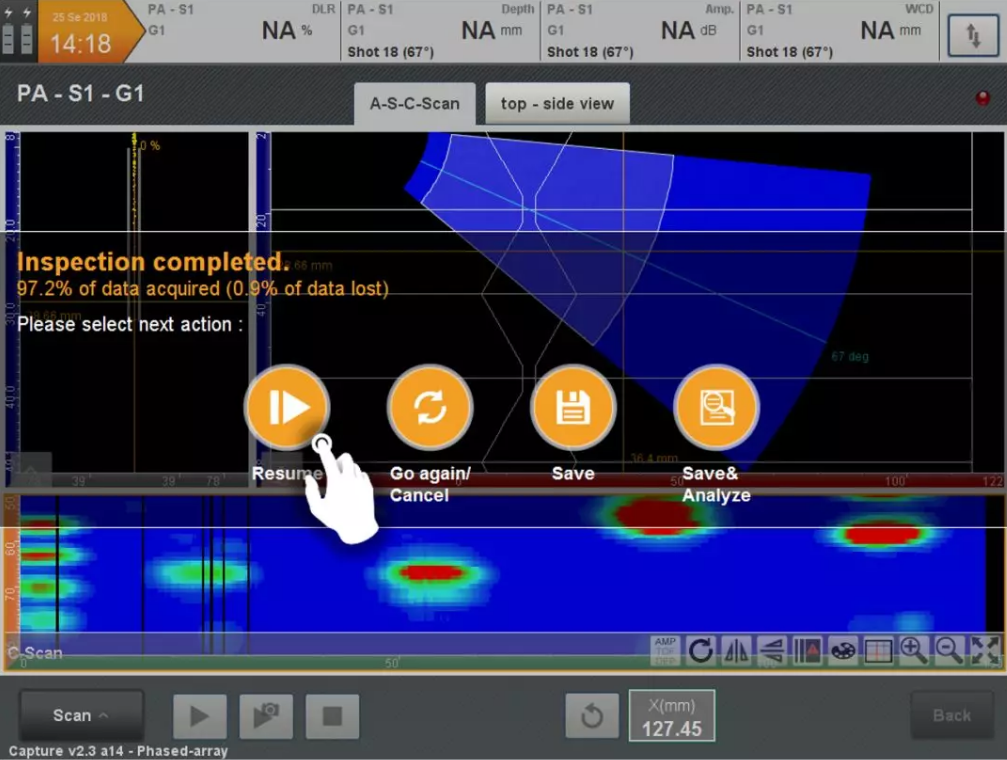
在執(zhí)行現(xiàn)場(chǎng)檢測(cè)過程中����,由于檢測(cè)速度的不均勻(速度不均可能是認(rèn)為造成的���,或者是工件表面的飛濺等異物造成的),超過既定檢測(cè)速度上限時(shí)����,便會(huì)造成數(shù)據(jù)丟失�。數(shù)據(jù)丟失比例在各大檢測(cè)標(biāo)準(zhǔn)中都有明文規(guī)定,如果數(shù)據(jù)丟失超過規(guī)定上限�,便需要重新檢測(cè)。通常在儀器的C掃描或者D掃描上會(huì)以黑色(或其他顏色)來指示丟失的缺陷位置���。但是由于我們儀器的顯示屏分辨率有限����,比如在C掃描顯示窗口中有800個(gè)橫向像素點(diǎn)���,但是檢測(cè)數(shù)據(jù)采集了1600個(gè)數(shù)據(jù)����,通常儀器會(huì)從兩個(gè)相鄰數(shù)據(jù)點(diǎn)選擇一個(gè)來顯示�����,選擇原則是幅值最覆蓋幅值小的數(shù)據(jù)。這種覆蓋的原則極有可能掩蓋數(shù)據(jù)丟失點(diǎn)����,但是限于設(shè)備顯示分辨率,我們無法直接肉眼觀察到此問題的存在����,或者量化數(shù)據(jù)的丟失率。在2.3版中����,當(dāng)數(shù)據(jù)采集完成后,立即會(huì)顯示數(shù)據(jù)丟失率�,讓操作人員立即進(jìn)行數(shù)據(jù)有效性判斷。
注意�,此功能只能檢測(cè)由于檢測(cè)速度大于額定速度帶來的數(shù)據(jù)丟失,無法偵測(cè)由于耦合不良造成的數(shù)據(jù)有效性�。
此外M2M便攜式產(chǎn)品線經(jīng)理Grégoire Benoist 先生表示:“Capture v2.3版本將M2M的創(chuàng)新保持在最先進(jìn)的水平。其研發(fā)團(tuán)隊(duì)致力于針對(duì)新的應(yīng)用案例進(jìn)行軟件開發(fā)�����,提高可操作性����,實(shí)現(xiàn)快速設(shè)置創(chuàng)建并提高數(shù)據(jù)評(píng)價(jià)分析效率���。”
Capture軟件操作的便利性是Gekko和Mantis成功的關(guān)鍵因素之一�。 Capture為現(xiàn)場(chǎng)操作員提供了一個(gè)智能平臺(tái),可以非常方便高效地使用標(biāo)準(zhǔn)相控陣技術(shù)(PE���,TOFD�,PA)和TFM等先進(jìn)的相控陣技術(shù)開展檢測(cè)工作���。 其中TFM是過去十年以來非常先進(jìn)的超聲相控陣成像技術(shù),可以更好地檢測(cè)缺陷并簡(jiǎn)化缺陷表征����,Capture每一代更新都對(duì)此技術(shù)進(jìn)行不斷優(yōu)化,不斷挖掘硬件性能的潛力����,讓此技術(shù)的實(shí)用性發(fā)揮到極致。
上面是2.3版升級(jí)給大家?guī)淼膸讉€(gè)亮點(diǎn)�����,更多的功能,更多的優(yōu)化請(qǐng)見以下列表:

2018年GEKKO憑借2.3.0版軟件成功通過美國電力科學(xué)研究院的能力驗(yàn)證(Electric Power Research
Institute�����,EPRI)���。此次能力驗(yàn)證主要是針對(duì)對(duì)鐵磁性鋼和奧氏體不銹鋼管道對(duì)接焊縫手動(dòng)相控陣檢測(cè)工藝"EPRI-PIPE-MPA-1_Rev2"�����。奧氏體不銹鋼的驗(yàn)證范圍為外徑大于38.1mm���,壁厚范圍3.4mm-88.9mm的管道;鐵磁性材質(zhì)管道的規(guī)格范圍為:直徑大于88.9mm���,壁厚范圍6.0mm-123.2mm����。此次成功通過EPRI的能力驗(yàn)證給予M2M團(tuán)隊(duì)極大的信心���,并預(yù)計(jì)將在2019年完成其他幾項(xiàng)重要能力驗(yàn)證�。EPRI的能力驗(yàn)證堪稱是美國核電行業(yè)的門票�,不但是對(duì)儀器的硬件能力的重要認(rèn)可����,并且對(duì)儀器的軟件功能提出了大量苛刻要求�����。M2M將總結(jié)此次能力驗(yàn)證的經(jīng)驗(yàn)并用此更好服務(wù)于我們的廣大用戶�。
2019年新年伊始,經(jīng)過了7個(gè)多月的緊張研發(fā)測(cè)試 M2M 正式發(fā)布便攜儀器專用操作平臺(tái)軟件Capture 的最新版 2.3 版�。同步推出的版本包括 Capture GEKKO、Capture Mantis����、Capture PC、Capture Viewer����。Capture是M2M 兩款主要便攜式相控陣檢測(cè)儀 Gekko 和 Mantis 的機(jī)載軟件���,它是集檢測(cè)工藝設(shè)計(jì)���、數(shù)據(jù)采集和后期數(shù)據(jù)分析為一體的相控陣檢測(cè)操作平臺(tái)。Capture大量采用圖形化交互式全中文界面�����,操作簡(jiǎn)單,功能完善已經(jīng)得到廣大用戶的一致認(rèn)可�����。
Capture的設(shè)計(jì)宗旨是簡(jiǎn)單高效�,讓操作人員可以在現(xiàn)場(chǎng)快速完成參數(shù)設(shè)置及校準(zhǔn),在復(fù)雜艱難的工作環(huán)境下短時(shí)間完成檢測(cè)任務(wù)����。整個(gè)操作流程,各步驟的次序銜接都做到最大程度符合UT檢測(cè)人員的工作習(xí)慣����;從器材配置、超聲工藝����、數(shù)據(jù)采集和分析都能快速無誤的完成操作。同時(shí)M2M工程師針對(duì)不同的應(yīng)用場(chǎng)景設(shè)計(jì)了應(yīng)用模塊向?qū)?����,預(yù)置參數(shù)得到了極大的優(yōu)化���,操作步驟更加有邏輯性���,很大程度上降低了配置失誤�����,提高工作效率����。
完善的功能給特殊的檢測(cè)工藝設(shè)計(jì)帶來了更多的可能性�����,使儀器的能被應(yīng)用到更有挑戰(zhàn)的檢測(cè)工作中����。
-
支持的標(biāo)準(zhǔn)工件類型包括:管材板材原材料及焊縫、TKY結(jié)構(gòu)焊縫���、插管及管座角焊縫,同時(shí)對(duì)于更加復(fù)雜的工件結(jié)構(gòu)Capture支持用戶導(dǎo)入工件CAD圖�,比如葉根、大小接頭焊縫及鋼軌和一些特殊結(jié)構(gòu)鍛件等�。
-
聚焦點(diǎn)分布區(qū)域的的精確設(shè)置(支持深度聚焦���、等聲程聚焦和投影聚焦)允許在某些特殊檢測(cè)應(yīng)用上得到更好的檢測(cè)靈敏度。
-
Capture提供一整套易用的快速校準(zhǔn)工具���,器材的準(zhǔn)備方面有:工件聲速���、探頭晶片一致性、探頭零點(diǎn)���、楔塊聲速角度校準(zhǔn)和編碼器精度校準(zhǔn)����。超聲校準(zhǔn)包括:TCG���、DAC�����、DGS等的快速定量校準(zhǔn)工具����。
-
豐富的視圖系統(tǒng)包括A、B�、C、D����、3D、頂視圖����、側(cè)視圖及前視圖保證檢測(cè)結(jié)果能更加直觀地顯示,對(duì)缺陷位置的判斷更加準(zhǔn)確�,大大降低了評(píng)圖分析的時(shí)間。
Capture 在過去5年中�����,以每年兩次的高效率更新速度不斷優(yōu)化操作設(shè)置�����,我們認(rèn)真地傾聽用戶的意見反饋����,及時(shí)調(diào)整不合理設(shè)置且對(duì)所有反饋的BUG都快速補(bǔ)救,下面讓我們來看今年的升級(jí)給我們帶來了哪些新的功能和性能提升�。
最新的 v2.3版本仍然以創(chuàng)新實(shí)用為指導(dǎo)����,更新優(yōu)化了多個(gè)高級(jí)功能���,增加了專用工具,可以極大的改善用戶體驗(yàn)并提升檢測(cè)工作的效率���。在這次最新升級(jí)中�����,M2M根據(jù)客戶所需進(jìn)行了重大更新:
-
針對(duì)腐蝕快速C掃和復(fù)合材料檢測(cè)的應(yīng)用�����,進(jìn)行了功能及效率的重大提升���。
-
完善了TOFD檢測(cè)及分析工具。
-
對(duì)全聚焦的性能進(jìn)行了全面提升�,極大優(yōu)化了硬件資源及TFM的成像算法,在同樣圖像分辨率的前提下將TFM成像檢測(cè)速度提升了3.5倍���。
-
增加曲面楔塊角度/高度校準(zhǔn)助手(AOD / COD)���,提升了對(duì)縱向焊縫回波的定位精度����。
在此我們將選取幾個(gè)重要的功能更新進(jìn)行詳細(xì)介紹���。
1 ·. 半步掃查法
首先是線性掃查步進(jìn)精度的提升���,傳統(tǒng)的線性掃查的最小步進(jìn)為單個(gè)晶片的pitch值尺寸,如果需要提高檢測(cè)范圍的橫向分辨率只能減小晶片Pitch值�;然而為了保證其檢測(cè)范圍一致,必須增加探頭的晶片數(shù)量����,限于儀器通道總數(shù)量已經(jīng)確定,從而此項(xiàng)優(yōu)化無法如愿���。M2M工程師巧妙地設(shè)計(jì)了以半個(gè)晶片長(zhǎng)度為步進(jìn)精度的高精度掃查模式:“半步掃查法”���。我們以16個(gè)晶片為一組虛擬孔徑實(shí)現(xiàn)電子掃查為例來介紹其實(shí)現(xiàn)原理。首先傳統(tǒng)的電子掃查模式的晶片分配利用辦法為〔1-16〕〔2-17〕〔3-18〕〔4-19〕..., 虛擬探頭孔徑為固定的16個(gè)晶片為一組�,以一個(gè)晶片為步進(jìn)整體移動(dòng),掃查精度為一個(gè)晶片的pitch值尺寸�����。
傳統(tǒng)線性電子掃查虛擬孔徑掃查方法
相對(duì)傳統(tǒng)的線性掃查,半步掃查法的虛擬孔徑晶片分配方式為16晶片和17個(gè)晶片交替進(jìn)行:〔1-16〕〔1-17〕〔2-17〕〔2-18〕〔3-18〕〔3-19〕〔4-19〕〔4-20〕...由此以來����,使用同一個(gè)探頭相對(duì)傳統(tǒng)電子掃查辦法�����,可使聲束將在每半個(gè)pitch值的位置進(jìn)行一次發(fā)射接收���,同一檢測(cè)位置聲束數(shù)量增加一倍�,橫向分辨率增加了一倍�����。需要說明16晶片與17晶片合成的聲束能量差異極小且可以通過虛擬探頭一致性校準(zhǔn)消除差異�。我們將在另外一篇文章中利用實(shí)例介紹其具體優(yōu)勢(shì)。
具體實(shí)現(xiàn)方式如下
半步法線性電子掃查虛擬孔徑掃查方法
熟悉M2M Capture軟件平臺(tái)的用戶都了解在楔塊校準(zhǔn)中Capture可以進(jìn)行楔塊角度的自動(dòng)校準(zhǔn)����,此功能對(duì)被磨損的楔塊有較好的修正作用。實(shí)現(xiàn)原理是已知楔塊聲速(可以利用Capture提供的工具進(jìn)行校準(zhǔn))前提下�����,利用采集到的每個(gè)晶片單獨(dú)發(fā)射的聲波在楔塊底面(與工件接觸面)的回波聲程來計(jì)算出楔塊的延遲和角度??梢栽谝欢ǔ潭壬舷捎谛▔K磨損理論角度改變帶來的缺陷定位誤差問題。但是此校準(zhǔn)工具只是用于平面斜楔塊和AOD(Axial Ouside Diameter)型弧度楔塊上���,無法應(yīng)用到COD(Circumferential Outside Diameter)型楔塊上���。
COD楔塊主要應(yīng)用到管道縱向直焊縫檢測(cè)中,由于楔塊的特殊結(jié)構(gòu)�����,如果沒有在設(shè)備軟件中輸入準(zhǔn)確的參數(shù)���,將對(duì)檢測(cè)結(jié)果造成直接影響�����,比如聚焦位置的準(zhǔn)確性�,回波定位的準(zhǔn)確性等等���。
V2.3版本中新增的COD楔塊計(jì)算工具可以一鍵快速準(zhǔn)確地計(jì)算出COD楔塊的弧度����,入射點(diǎn)位置,入射角度以及對(duì)應(yīng)的楔塊延遲����。可以最大程度降低楔塊設(shè)置的不確定性�,給管道直焊縫等結(jié)構(gòu)檢測(cè)提供了極大的便利。此工具的重大挑戰(zhàn)是COD弧形楔塊無法像常規(guī)平楔塊或AOD楔塊一樣對(duì)每一個(gè)晶片激勵(lì)的超聲波都能有效反射����,存在反射盲區(qū)(如下圖左側(cè)藍(lán)色部分回波B掃圖所示)�,但是M2M開發(fā)的高階數(shù)學(xué)算法讓使用人員在保證能采集到一半晶片回波的前提下準(zhǔn)確計(jì)算出楔塊的弧度角度和延遲(如下圖右側(cè)計(jì)算結(jié)果)。
3 ·. 探頭激勵(lì)接收孔徑分開自由設(shè)置
為了最大程度相控陣檢測(cè)技術(shù)的潛力���,從2.3版開始Capture允許用戶自由地在同一探頭上選擇激勵(lì)與接收的孔徑(晶片組)�����。在一些特殊檢測(cè)工藝中����,我們?cè)?jīng)嘗試使用探頭上一部分晶片組來激勵(lì)發(fā)射脈沖�,而使用另一部分晶片組來進(jìn)行能量接收���,用于檢測(cè)無法利用脈沖回波直接檢測(cè)的有方向性的缺陷比如垂直性缺陷。同時(shí)對(duì)與一些面陣探頭檢測(cè)工藝中����,也有用戶根據(jù)檢測(cè)厚度區(qū)域的不同,采用不同的工作晶片組來實(shí)現(xiàn)更好的聲束覆蓋�。
上圖中紅色晶片組為選中的激勵(lì)晶片組合,藍(lán)色部分為選中的接收晶片組合�����,下方可以選擇激勵(lì)與接收一致或否�����。這樣的配置適用于線陣�����、面陣����、雙線陣以及雙線陣探頭。
在執(zhí)行現(xiàn)場(chǎng)檢測(cè)過程中���,由于檢測(cè)速度的不均勻(速度不均可能是認(rèn)為造成的�,或者是工件表面的飛濺等異物造成的),超過既定檢測(cè)速度上限時(shí)�����,便會(huì)造成數(shù)據(jù)丟失�����。數(shù)據(jù)丟失比例在各大檢測(cè)標(biāo)準(zhǔn)中都有明文規(guī)定����,如果數(shù)據(jù)丟失超過規(guī)定上限���,便需要重新檢測(cè)���。通常在儀器的C掃描或者D掃描上會(huì)以黑色(或其他顏色)來指示丟失的缺陷位置。但是由于我們儀器的顯示屏分辨率有限���,比如在C掃描顯示窗口中有800個(gè)橫向像素點(diǎn)�����,但是檢測(cè)數(shù)據(jù)采集了1600個(gè)數(shù)據(jù)����,通常儀器會(huì)從兩個(gè)相鄰數(shù)據(jù)點(diǎn)選擇一個(gè)來顯示,選擇原則是幅值最覆蓋幅值小的數(shù)據(jù)�����。這種覆蓋的原則極有可能掩蓋數(shù)據(jù)丟失點(diǎn)�����,但是限于設(shè)備顯示分辨率����,我們無法直接肉眼觀察到此問題的存在,或者量化數(shù)據(jù)的丟失率�����。在2.3版中�����,當(dāng)數(shù)據(jù)采集完成后,立即會(huì)顯示數(shù)據(jù)丟失率���,讓操作人員立即進(jìn)行數(shù)據(jù)有效性判斷�����。
注意�����,此功能只能檢測(cè)由于檢測(cè)速度大于額定速度帶來的數(shù)據(jù)丟失�,無法偵測(cè)由于耦合不良造成的數(shù)據(jù)有效性�。
此外M2M便攜式產(chǎn)品線經(jīng)理Grégoire Benoist 先生表示:“Capture v2.3版本將M2M的創(chuàng)新保持在最先進(jìn)的水平。其研發(fā)團(tuán)隊(duì)致力于針對(duì)新的應(yīng)用案例進(jìn)行軟件開發(fā)���,提高可操作性�,實(shí)現(xiàn)快速設(shè)置創(chuàng)建并提高數(shù)據(jù)評(píng)價(jià)分析效率���。”
Capture軟件操作的便利性是Gekko和Mantis成功的關(guān)鍵因素之一���。 Capture為現(xiàn)場(chǎng)操作員提供了一個(gè)智能平臺(tái)�����,可以非常方便高效地使用標(biāo)準(zhǔn)相控陣技術(shù)(PE����,TOFD,PA)和TFM等先進(jìn)的相控陣技術(shù)開展檢測(cè)工作���。 其中TFM是過去十年以來非常先進(jìn)的超聲相控陣成像技術(shù)�,可以更好地檢測(cè)缺陷并簡(jiǎn)化缺陷表征�,Capture每一代更新都對(duì)此技術(shù)進(jìn)行不斷優(yōu)化,不斷挖掘硬件性能的潛力����,讓此技術(shù)的實(shí)用性發(fā)揮到極致。
上面是2.3版升級(jí)給大家?guī)淼膸讉€(gè)亮點(diǎn)�,更多的功能,更多的優(yōu)化請(qǐng)見以下列表:
2018年GEKKO憑借2.3.0版軟件成功通過美國電力科學(xué)研究院的能力驗(yàn)證(Electric Power Research
Institute����,EPRI)。此次能力驗(yàn)證主要是針對(duì)對(duì)鐵磁性鋼和奧氏體不銹鋼管道對(duì)接焊縫手動(dòng)相控陣檢測(cè)工藝"EPRI-PIPE-MPA-1_Rev2"���。奧氏體不銹鋼的驗(yàn)證范圍為外徑大于38.1mm�,壁厚范圍3.4mm-88.9mm的管道;鐵磁性材質(zhì)管道的規(guī)格范圍為:直徑大于88.9mm����,壁厚范圍6.0mm-123.2mm。此次成功通過EPRI的能力驗(yàn)證給予M2M團(tuán)隊(duì)極大的信心���,并預(yù)計(jì)將在2019年完成其他幾項(xiàng)重要能力驗(yàn)證�����。EPRI的能力驗(yàn)證堪稱是美國核電行業(yè)的門票����,不但是對(duì)儀器的硬件能力的重要認(rèn)可����,并且對(duì)儀器的軟件功能提出了大量苛刻要求。M2M將總結(jié)此次能力驗(yàn)證的經(jīng)驗(yàn)并用此更好服務(wù)于我們的廣大用戶���。